

The aim
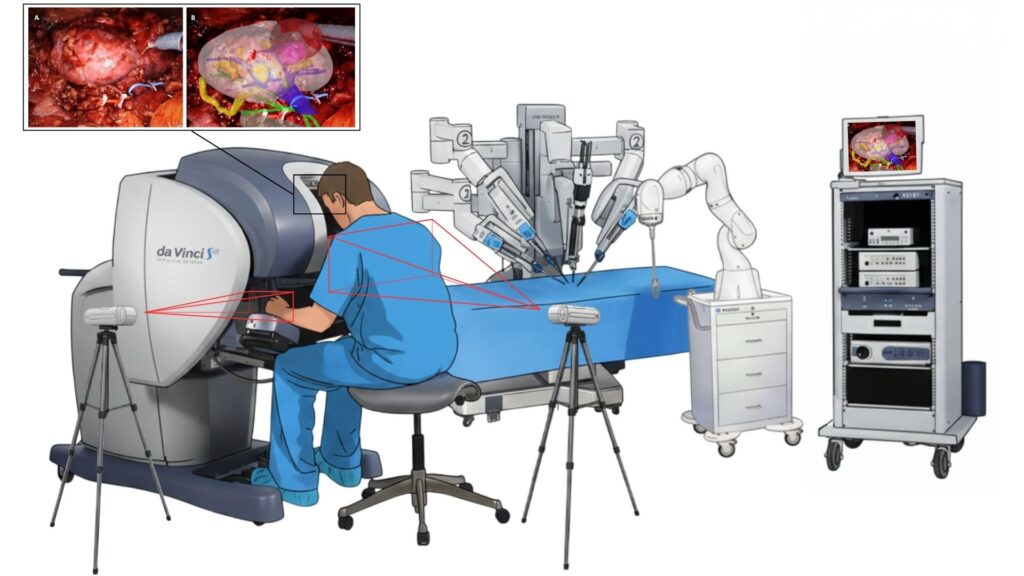
The project “Trustworthy Robotic Assistant for Improved Minimally Invasive Surgery” (TRAMIS) aims to develop an autonomous robotic system designed to support surgeons during manually performed or robot-assisted minimally invasive procedures.
The TRAMIS system will leverage advanced environmental perception and a deep understanding of the surgical scene through the design of robust Artificial Intelligence algorithms for intraoperative image analysis. Based on this data, safe and efficient motion planning and robot control algorithms will be developed to ensure that the robot’s behavior adapts to the rapidly evolving surgical environment.
Key features of the system include:
- An advanced AR module will superimpose critical diagnostic and procedural information onto intraoperative images.
- A dedicated module will monitor the surgeon’s posture, providing real-time suggestions and adapting the robot’s behavior to improve ergonomic comfort.
- A final module will evaluate the surgeon’s performance (including progress within a training curriculum) to implement automated corrective actions via the robotic system.
- Trustworthiness and ethical assessment of the developed algorithms
Research objectives
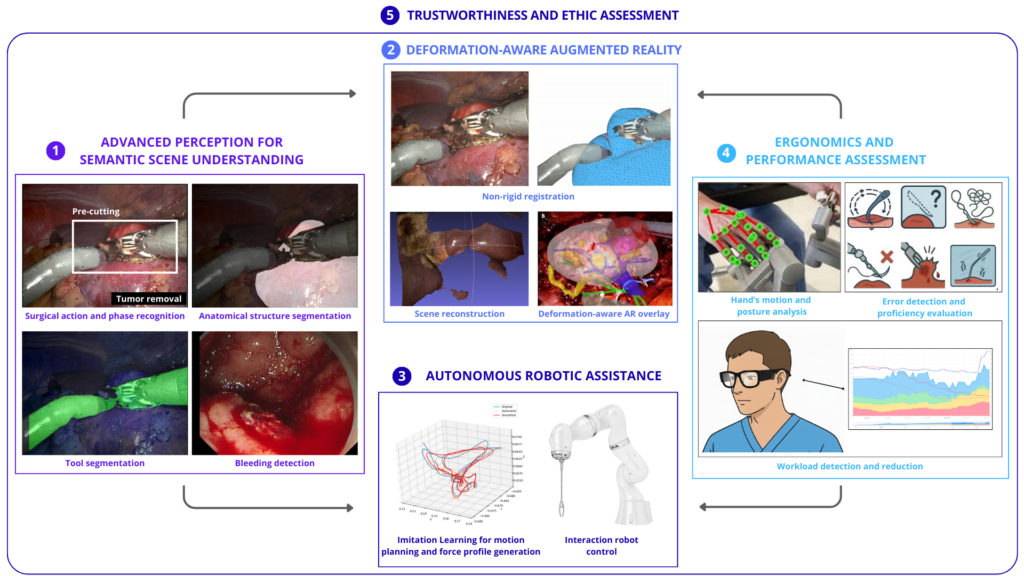
(RO1) Develop trustworthy deep learning algorithms for advanced intra-operative image analysis and semantic scene understanding.
(RO2) Develop a deformation-aware augmented reality system that overlays in real-time pre-operative data onto the intra-operative images displayed on the surgeon’s console or monitor.
(RO3) Establish safe and efficient robot planning and control to ensure rapid behavioral adjustment to the dynamic operating room environment, guaranteeing natural, safe, and maximally efficient movements.
(RO4) Design surgeon ergonomics and workload assessment for the continuous assessment of surgeon posture, hand movements, and workload using eye gaze tracking, enabling real-time ergonomic feedback through adaptive AR visualization and dynamically adapting the robotic assistant’s behavior and camera positioning to maximize comfort and minimize fatigue.
(RO5) Integrate intra-operative performance assessment and error detection for adaptive autonomy to trigger the robotic assistant to adapt its behavior, and update AR overlays accordingly.
(RO6) Develop a framework for trustworthiness and ethical assessment, evaluating and mitigating existing biases.
(RO7) Integrate and validate the system on a clinically-relevant use case.
Acknowledgement
The project has received founding from the Italian Ministry of University and Research under the D.D. 1236 (August, 1 2023), Fondo italiano per la scienza – Bando FIS 2 (TRAMIS, CUPE53C24003820001).